In the spirit of our DC Motor Powered Car, I worked with Cuyler Crandall and Zac Capel to built BOOM V2 for our Mechatronics class. The robot competed in a series of battles against other robots in the class to clear cubes to the opponent’s side of the playing field. The robot with the fewest cubes remaining on its side would win the match.
![]()
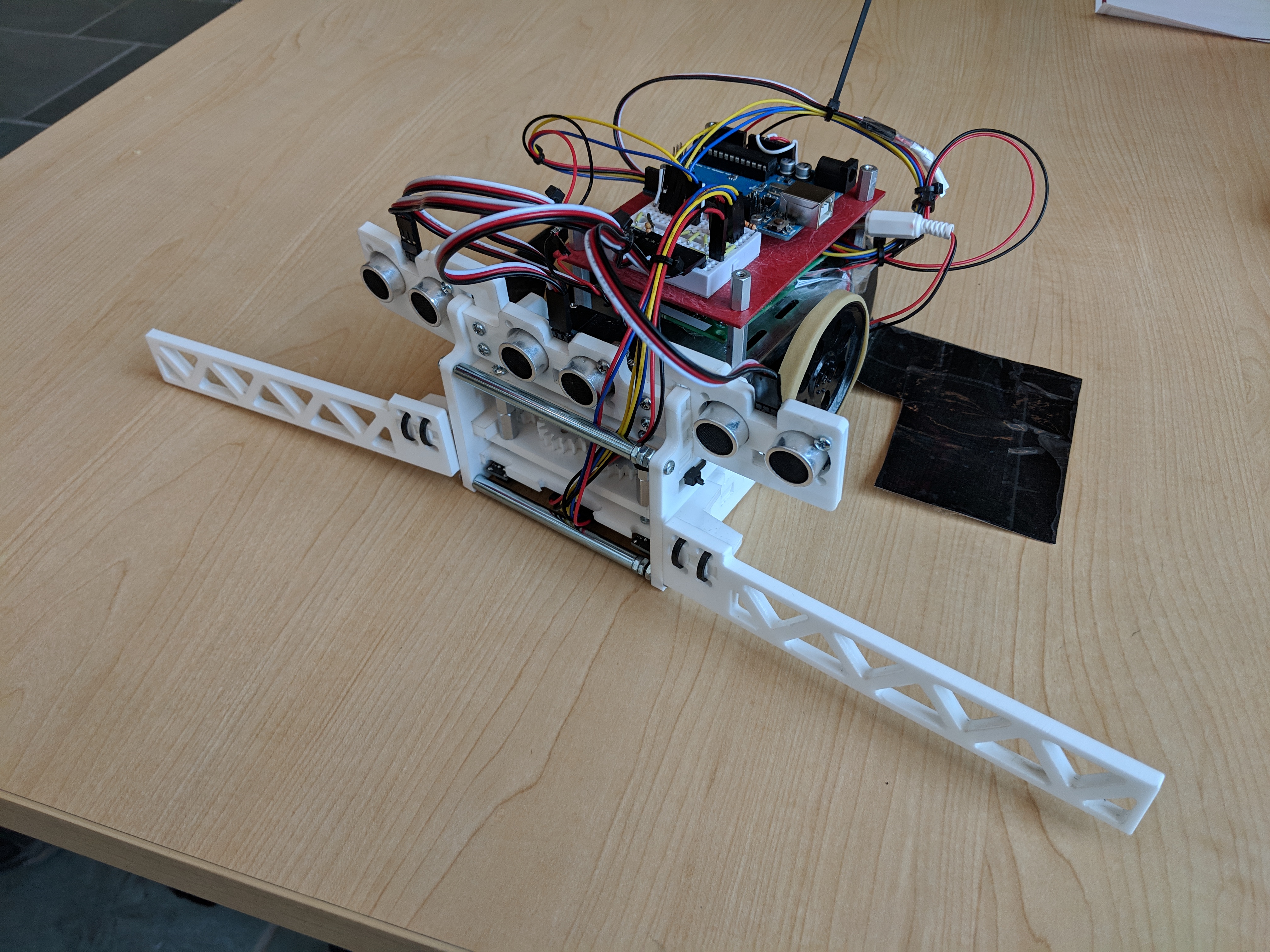
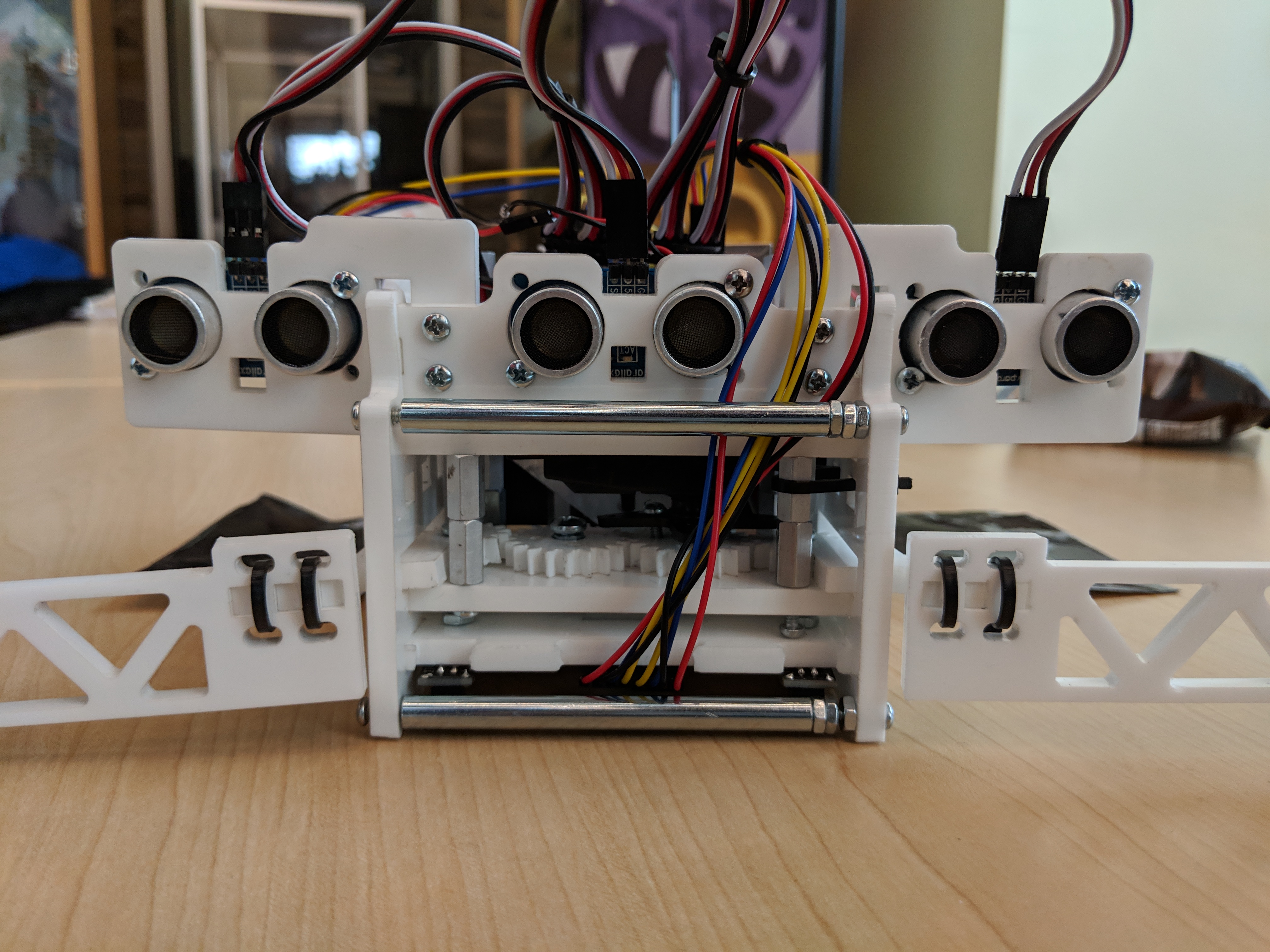
We opted to design a robot which would target the opponent’s robot and ram it off the field, after clearing a few cubes using sonar sensors, in addition to the QTI sensors used to track the ground color and all the servos and motors. Due to a limit on the breadboard size, we had to optimize our wiring to ensure the circuitry could fit compactly on to the robot.
![]()
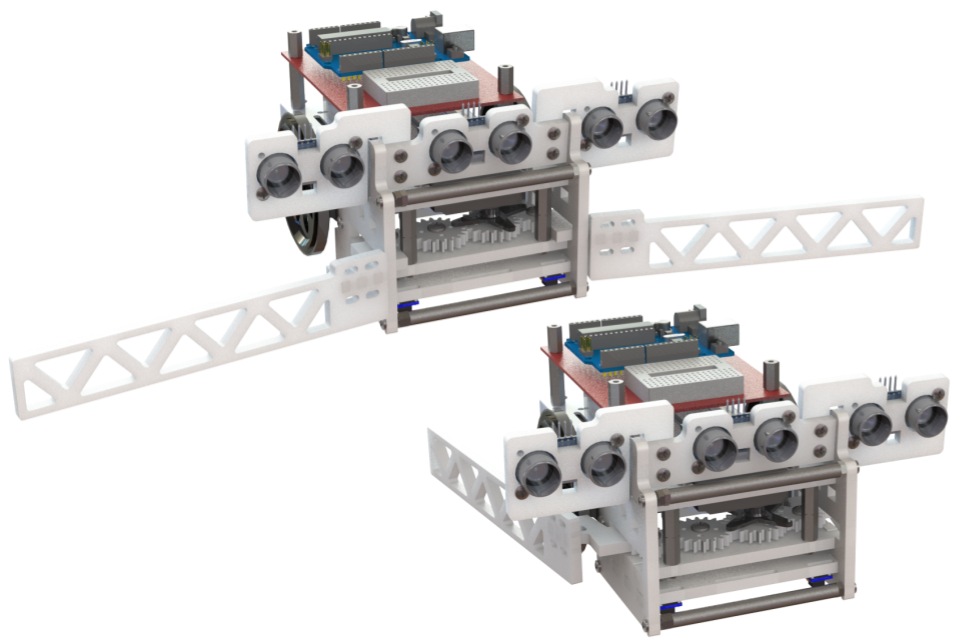
The robot was built out of acrylic frames and retractable arms added to the provided chassis, which provided strong connections to lower the robot’s center of gravity to keep it stable on the playing field. Sonar sensors were placed in an array to give the robot a wide view of the field.
The logic took a lot of tinkering to ensure the robot would not be tripped up by unplanned circumstances on the field, but we were confident in the logic programmed in the end.
![]()
![]()
![]()
![]()
Ultimately, the seeker part of the algorithm did not work as reliably as we hoped due to the sonar sensors sometimes failing to register the other robot. The block clearing part of the algorithm worked in its place as planned, to allow us to win matches comfortably.
For more details, check out our technical report and the pictures below.
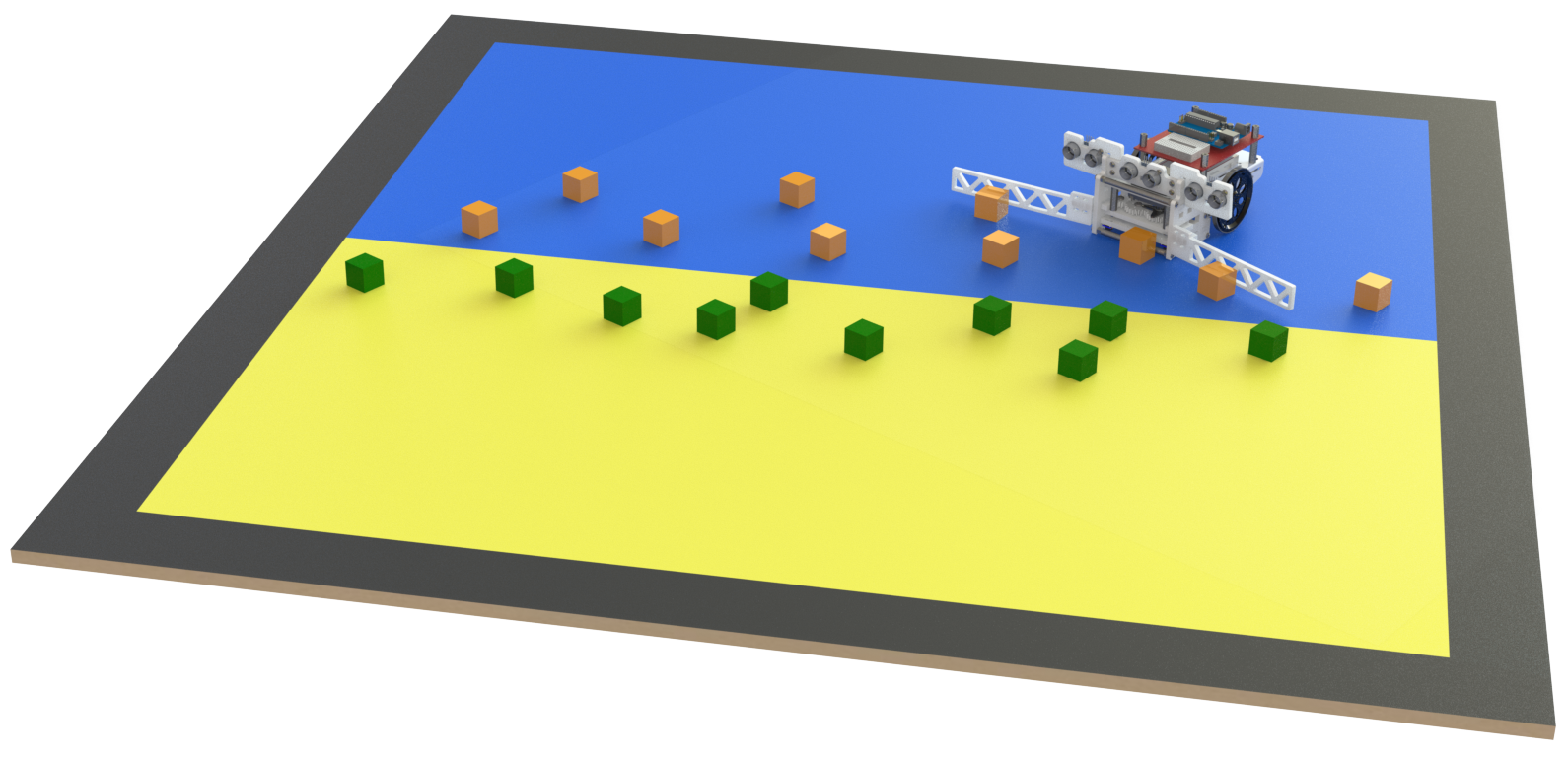
We opted to design a robot which would target the opponent’s robot and ram it off the field, after clearing a few cubes using sonar sensors, in addition to the QTI sensors used to track the ground color and all the servos and motors. Due to a limit on the breadboard size, we had to optimize our wiring to ensure the circuitry could fit compactly on to the robot.

The robot was built out of acrylic frames and retractable arms added to the provided chassis, which provided strong connections to lower the robot’s center of gravity to keep it stable on the playing field. Sonar sensors were placed in an array to give the robot a wide view of the field.
The logic took a lot of tinkering to ensure the robot would not be tripped up by unplanned circumstances on the field, but we were confident in the logic programmed in the end.
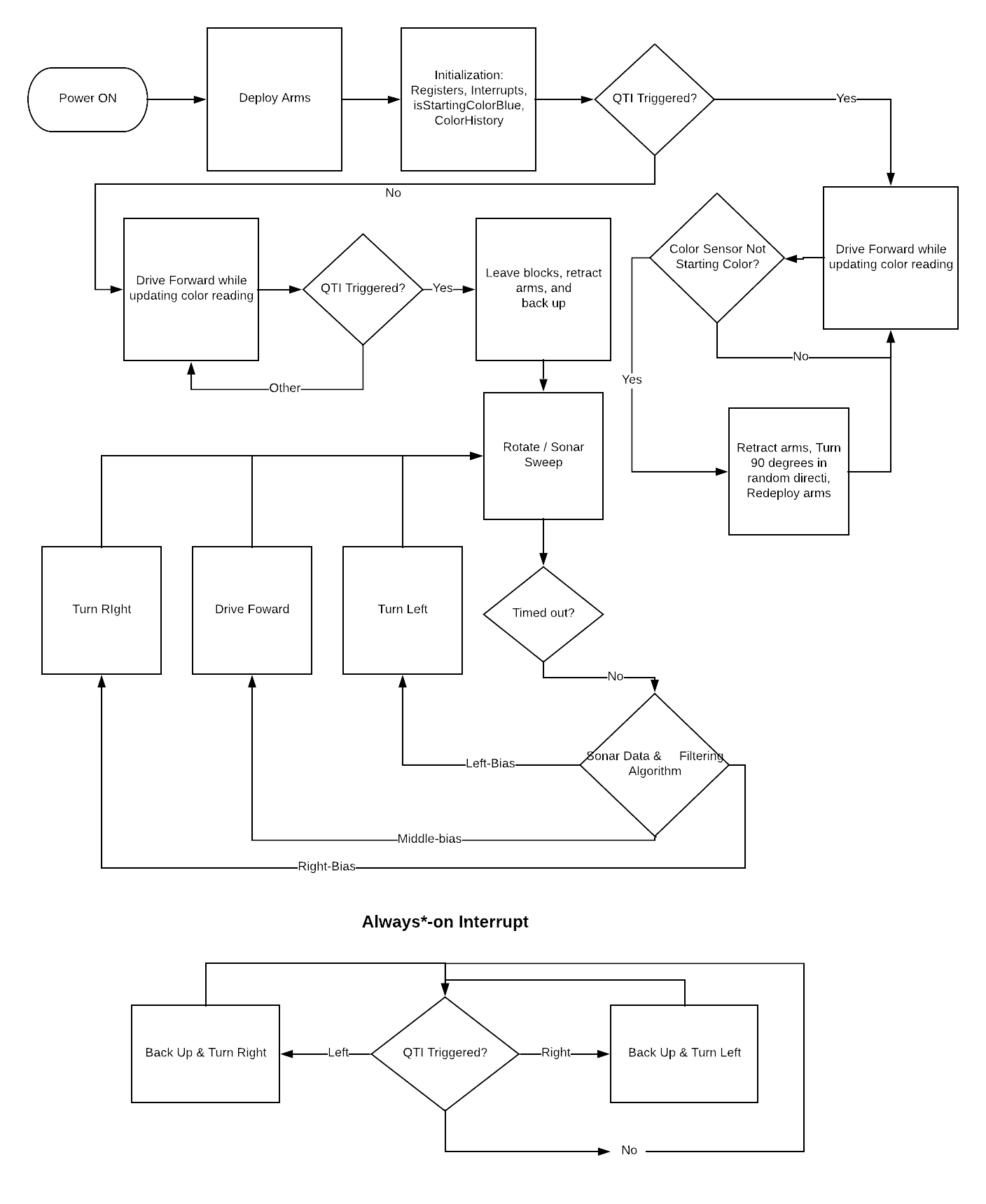
Ultimately, the seeker part of the algorithm did not work as reliably as we hoped due to the sonar sensors sometimes failing to register the other robot. The block clearing part of the algorithm worked in its place as planned, to allow us to win matches comfortably.
For more details, check out our technical report and the pictures below.
To comply with ITAR regulations and NDAs, all Astranis, Blue Origin, Northrop Grumman and SpaceX pictures shown are available publicly online